

摘要:晶体谐振器与机器人驱动装置在功能和原理上存在显著差异。晶体谐振器主要利用晶体材料的压电效应产生稳定的高频振荡,用于电子设备的时钟信号源和时间基准。而机器人驱动装置则是为机器人提供动力和执行指令的关键组件,通过电机和传动系统控制机器人的运动和操作。两者在应用领域和工作机制上有所不同。
本文目录导读:
随着科技的飞速发展,晶体谐振器和机器人驱动装置作为现代电子技术的关键组成部分,各自在领域中发挥着重要作用,晶体谐振器以其高精度、高稳定性的特点,广泛应用于各种电子设备中,而机器人驱动装置则是机器人运动控制的核心部件,本文将探讨晶体谐振器与机器人驱动装置的区别,从原理、应用及特点等方面进行深入剖析。
晶体谐振器概述
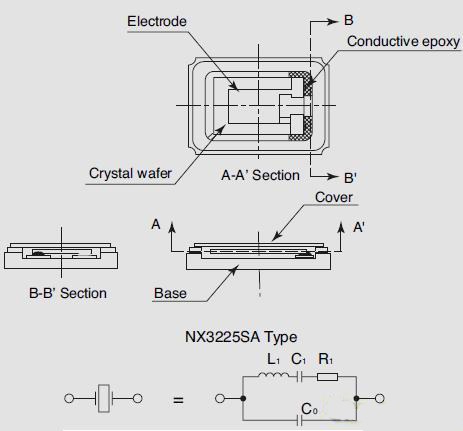
晶体谐振器是一种基于石英晶体压电效应的振荡器,其主要原理是利用石英晶体的压电效应,将直流能量转换为机械振动能量,晶体谐振器具有高精度、高稳定性、低噪声等特点,广泛应用于各种电子设备中,如通信设备、计算机、仪表等,晶体谐振器的主要功能是产生稳定的时钟信号,为电子设备提供精确的时间基准。
机器人驱动装置概述
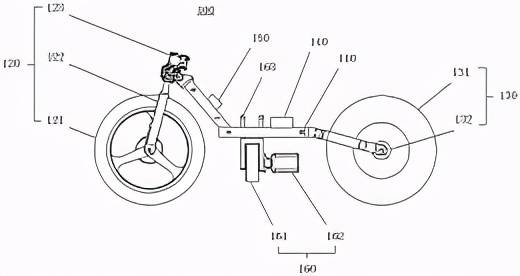
机器人驱动装置是机器人运动控制的核心部件,其主要功能是为机器人的运动提供动力,机器人驱动装置包括驱动器、电机和传动机构等部分,通过接收控制信号,驱动机器人执行各种动作,机器人驱动装置的类型多样,包括直流伺服驱动、交流伺服驱动、步进驱动等,不同类型的驱动装置适用于不同的机器人应用场景。
晶体谐振器与机器人驱动装置的区别
1、原理区别
晶体谐振器基于石英晶体的压电效应,将直流能量转换为机械振动能量,产生稳定的时钟信号,而机器人驱动装置则是通过驱动器、电机和传动机构等部件,将电能转换为机械能,为机器人的运动提供动力。
2、应用领域区别
晶体谐振器广泛应用于通信、计算机、仪表等电子设备中,为这些设备提供精确的时间基准,而机器人驱动装置则是应用于机器人领域,为机器人的运动控制提供动力。
3、功能与作用区别
晶体谐振器主要功能是产生稳定的时钟信号,为电子设备提供精确的时间基准,确保设备运行的稳定性与准确性,而机器人驱动装置的功能是为机器人的运动提供动力,使机器人能够执行各种动作和任务。
4、性能特点区别
晶体谐振器具有高精度、高稳定性、低噪声等特点,其性能稳定可靠,寿命长,而机器人驱动装置则具有响应速度快、动态精度高、驱动力强等特点,能够满足机器人的运动需求。
晶体谐振器与机器人驱动装置在原理、应用领域、功能与作用以及性能特点等方面存在明显的区别,晶体谐振器主要应用于各种电子设备中,为设备提供稳定的时间基准,而机器人驱动装置则是机器人运动控制的核心部件,为机器人的运动提供动力,两者在现代科技领域中各自发挥着重要作用,共同推动着科技的发展与进步。
展望
随着科技的不断发展,晶体谐振器和机器人驱动装置的性能将进一步提升,晶体谐振器可能会朝着更高频率、更低噪声、更高稳定性的方向发展,为电子设备提供更精确的时间基准,而机器人驱动装置则可能会更加智能化、高效化,通过引入先进的算法和技术,提高机器人的运动性能和效率,两者在应用领域上的交叉也将越来越多,例如在新一代通信技术、智能制造等领域,晶体谐振器和机器人驱动装置的应用将更加紧密,随着科技的进步,晶体谐振器和机器人驱动装置将在更多领域发挥重要作用,共同推动人类社会的进步与发展。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...